JTRF2020 is the Terrestrial Reference Frame (TRF) the Jet Propulsion Laboratory constructed by combining space geodetic inputs spanning 1979-2020 from Very Long Baseline Interferometry (VLBI), Satellite Laser Ranging (SLR), Global Navigation Satellite System (GNSS) and Doppler Orbitography and Radiopositioning Integrated by Satellite (DORIS) submitted for the determination of ITRF2020. Created through a square-root information filter (SRIF) and Dyer-McReynolds covariance smoother (DMCS) assimilating station position observations, Earth Orientation Parameters (EOPs), and local ties, JTRF2020 is a sub-secular, time series-based TRF whose origin is at the quasi-instantaneous center-of-mass (CM) of the Earth as sensed by SLR and whose scale is determined by the quasi-instantaneous VLBI and SLR scales.
A sequential estimation approach using a square-root information filter and Dyer-McReynolds covariance smoother was used to determine JTRF2020. An advantage of this approach is that the frame can be easily extended forward in time using new observations as they become available. The state vector and full covariance matrix can be saved at the end of the run. When new observations later become available, the filter can be re-started from the saved state, the new observations processed, and the extended state vector and covariance matrix saved again. Repeating this process allows the frame to be extended forward in time whenever new observations are available. Extensions to JTRF2020 are being determined in this manner.
What's New?
While KALREF was used to determine JTRF2014, a new software package, SREF (Square-root Reference frame Estimation Filter), was used to determine JTRF2020. New capabilities available in SREF that are not available in KALREF include the use of a variable time step which allows the input observations to be assimilated at the epoch of the observation, the use of a full process noise covariance matrix which allows regional correlations in station positions to be taken into account, the use of a postseismic displacement model to improve the predicted motion of stations affected by large earthquakes, and the ability to jointly determine terrestrial and celestial reference frames. The following table compares the new JTRF2020 solution that was determined using SREF to the previous JTRF2014 solution that was determined using KALREF.
JTRF2014
Software: KALREF
Number of Stations: 972 671 GNSS 159 DORIS 71 SLR 71 VLBI
Temporal Resolution: Weekly station positions, geocenter, scale Daily EOPs
Time Span: Frame-defining data set: 1979-2014 Extension of frame past 2020: No Predictions past last extension: No
Station Position Model: Piecewise linear trend Annual and semiannual periodic
JTRF2020
Software: SREF
Number of Stations: 931 525 GNSS 194 DORIS 116 SLR 96 VLBI
Temporal Resolution: Daily station positions, geocenter, scale Daily EOPs
Time Span: Frame-defining data set: 1979-2020 Extension of frame past 2020: Yes Predictions past last extension: 5 years
Station Position Model: Piecewise linear trend Annual periodic Postseismic displacement
Model
The software used to determine JTRF2020, SREF, fits a model to the station’s observations and uses that model to fill gaps in the station’s observing history, to forecast the position of the station after it stopped observing, and to hindcast its position before it started observing. For JTRF2020, the model consists of a piecewise linear trend, an annual periodic term, and a sum of exponential terms to represent postseismic motion for those stations that experience postseismic motion.
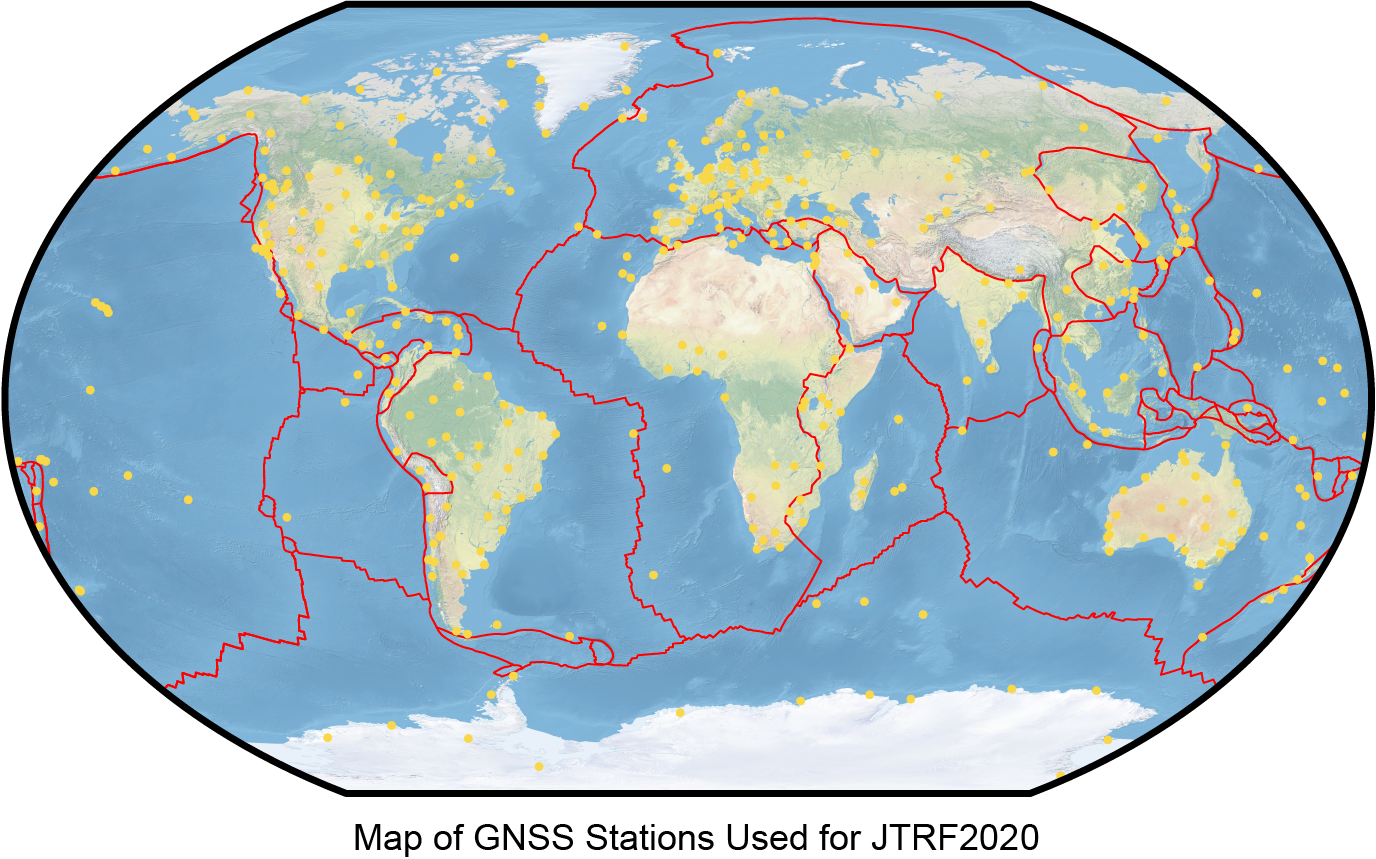
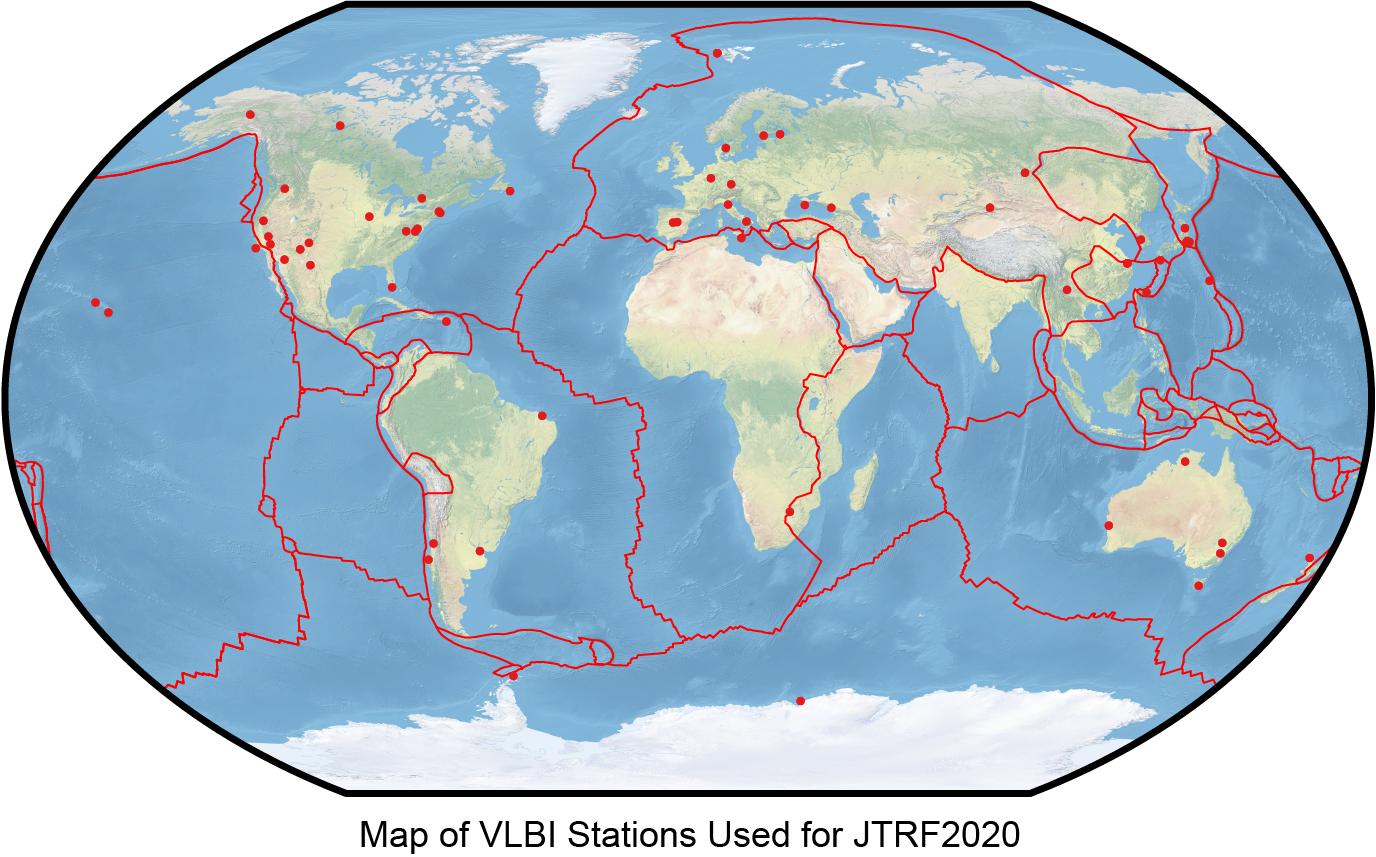
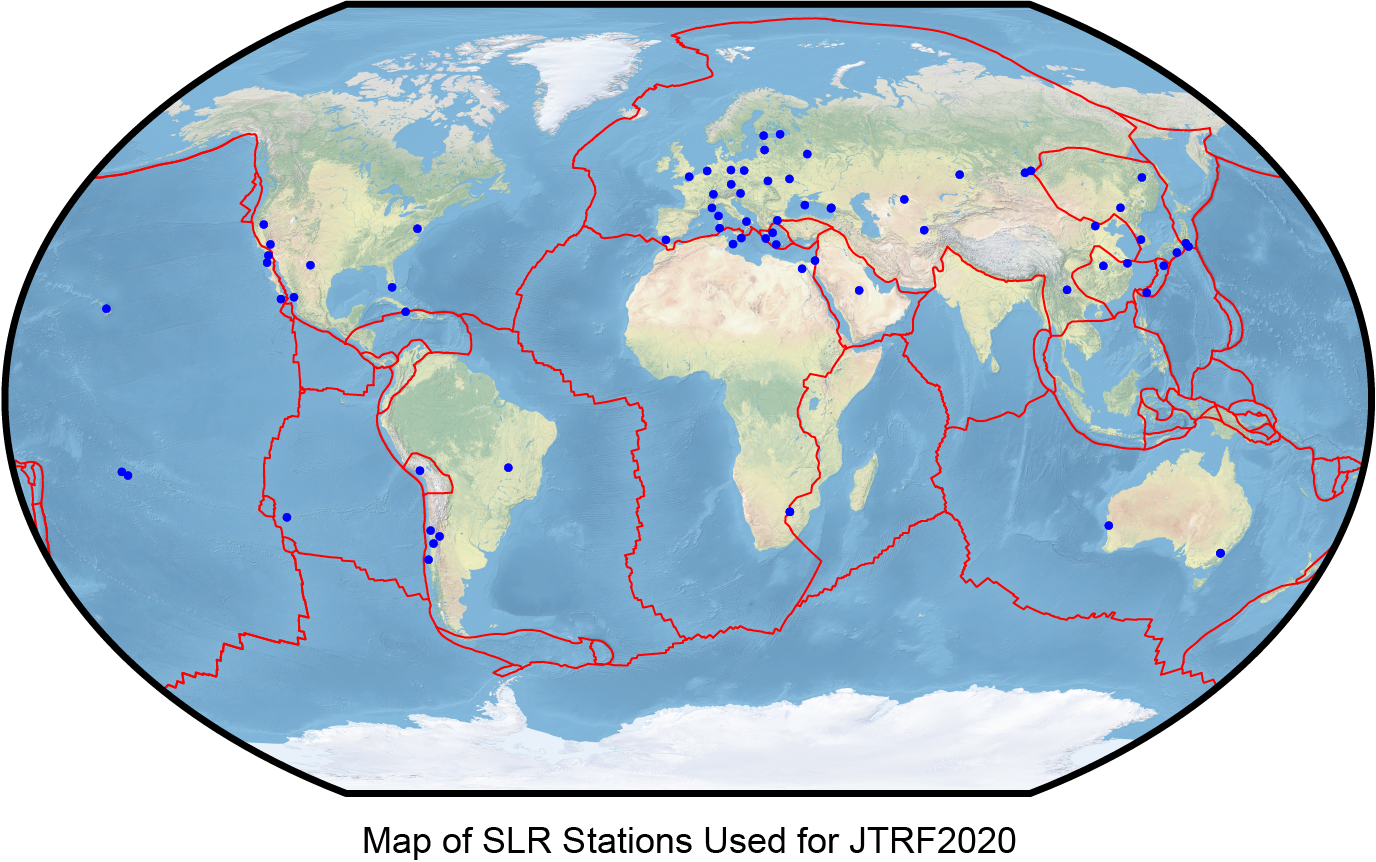
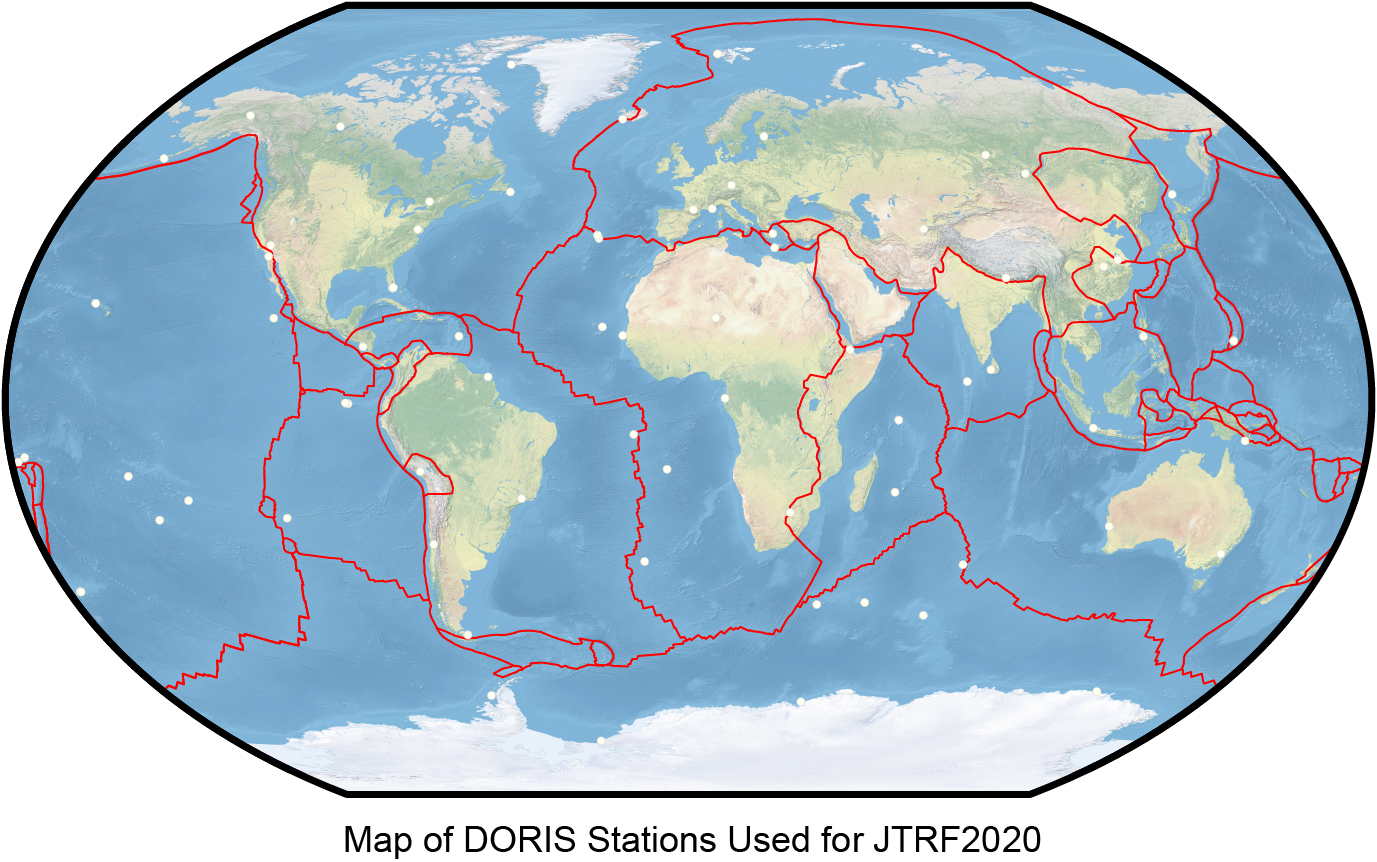
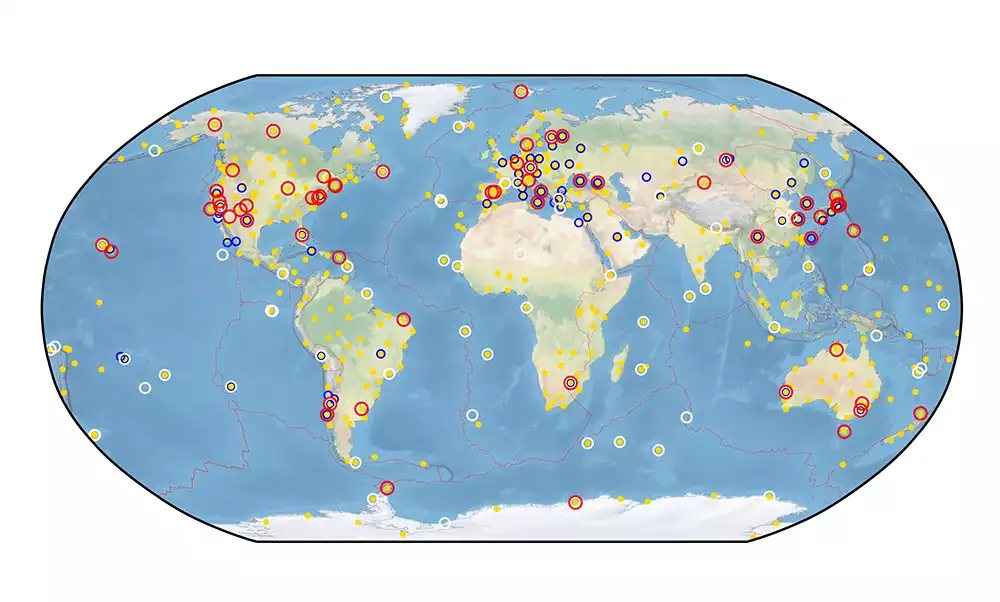
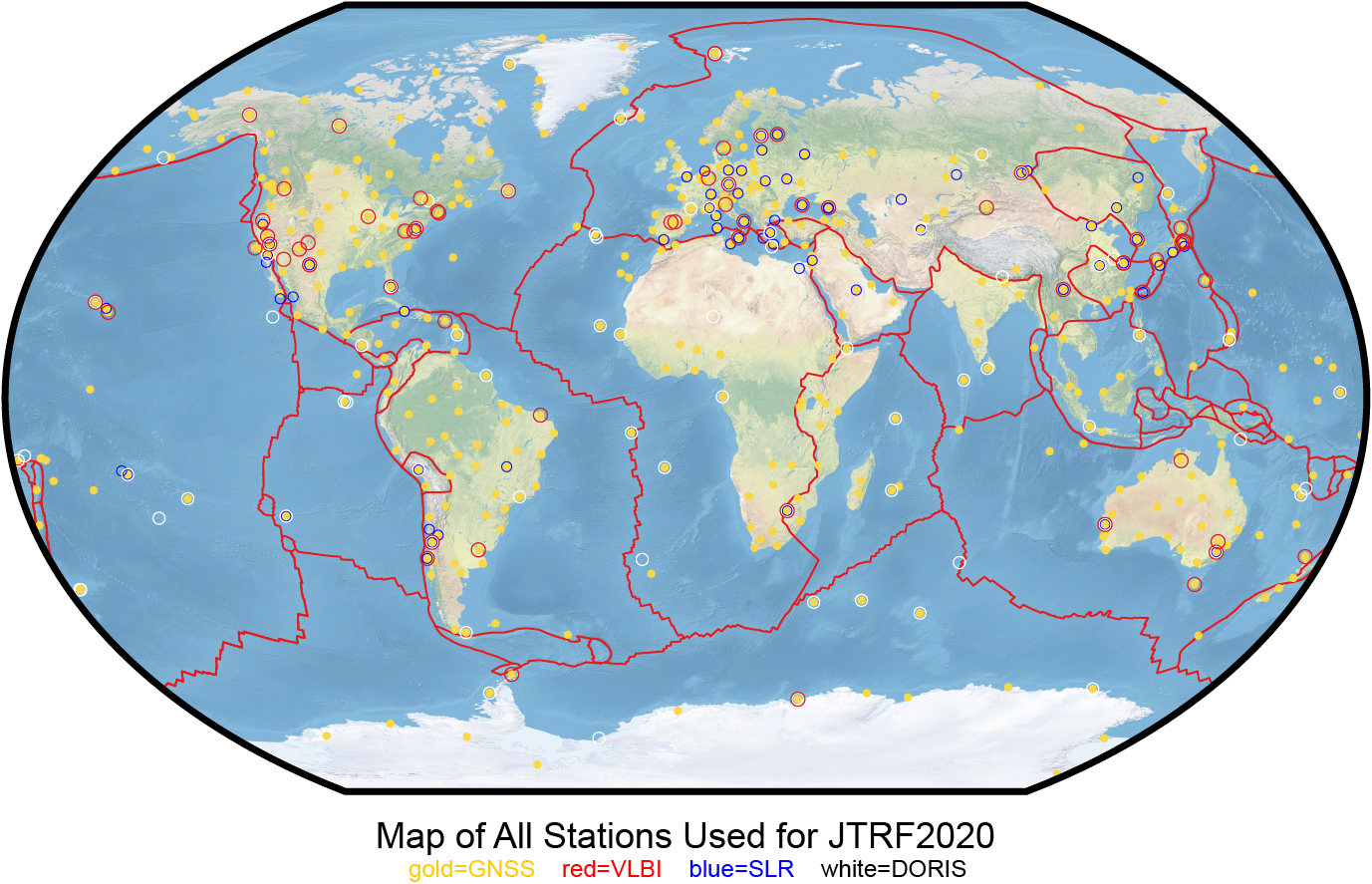
JTRF2020 consists of a set of position time series of 931 stations at daily intervals and daily combined EOPs along with their full covariance matrix. Since stations of different observing techniques are often co-located with each other at the same site, the 931 stations used to determine JTRF2020 are located at 489 sites on the Earth. Of these, 610 stations at 326 sites are located in the Northern hemisphere and 321 stations at 163 sites are located in the Southern hemisphere.
Global space-geodetic network adopted in the JTRF2020 combination. Gold dots identify the GNSS sites, red circles represent VLBI sites, blue circles are SLR sites, and white circles denote DORIS sites. The global network comprises 525 GNSS stations, 96 VLBI stations, 116 SLR stations, and 194 DORIS stations. Polygons drawn in red in the map represent tectonic plate boundaries.
References
Gross, R., Abbondanza, C., Chin, M., Heflin, M., and Parker, J.: JTRF2020: Results and Next Steps, EGU General Assembly 2023, Vienna, Austria, 24-28 Apr 2023, EGU23-2117, https://doi.org/10.5194/egusphere-egu23-2117, 2023.
Citation
If you use JTRF2020 in your research, please acknowledge it in your publications by citing:
Gross, R., Abbondanza, C., Chin, M., Heflin, M., and Parker, J.: JTRF2020: Results and Next Steps, EGU General Assembly 2023, Vienna, Austria, 24-28 Apr 2023, EGU23-2117, https://doi.org/10.5194/egusphere-egu23-2117, 2023.
Contact
Richard Gross 4800 Oak Grove Drive Pasadena, CA 91109 United States of America Email: richard.gross@jpl.nasa.gov
{kind=link}